BeamWatch 中的光束寬度測量方法
BeamWatch 中的光束寬度測量方法
D4σ(移動狹縫)和 D4σ(迭代)方法的回顧
高功率激光行業在近年來經歷了驚人的增長。使用不同波長和各種光束整形技術,使得該技術以令人驚嘆的速度進步。為了滿足市場需求,BeamWatch 系列產品中的非接觸測量系統也在不斷演變。
本文介紹了 BeamWatch 中可用的測量方法,展示其精確性,並提供如何為各種配置選擇合適測量方法的指導。目的是回答有關瑞利散射光束剖面測量系統的精確性和功能的相關問題。
作者:Fon Brown, Rachael Callaway, Oleg Zinoviev
D4σ (移動狹縫法)
最初集成到 BeamWatch 中的符合 ISO 標準的光束寬度測量方法採用了基於 1/e² 閾值的方法,這與 ISO 11146-3:2004(E) 第 4.4 節中概述的移動狹縫方法類似。該方法的詳細內容已在另一篇論文中描述1,該論文還比較了使用瑞利散射方法、相機和移動狹縫測量技術所獲得的數據。
雖然 D4σ(移動狹縫法)在高斯光束和平頂光束的測量中(即使在噪聲條件下)具有可靠性,但此技術在測量某些非高斯光束(如甜甜圈光束或雙環/核心結構光束)時往往低估其腰部直徑。隨著不同行業(特別是焊接和增材製造應用)越來越多地採用各種光束結構,一種替代的 D4σ 方法變得必要。
D4σ (迭代法)
D4σ(迭代法)光束寬度測量方法採用二階矩的方法,先計算每個一維光束剖面的寬度,然後再計算光束焦點區域(caustic)。該方法對於偏離高斯分佈的光束剖面能提供更準確的結果。然而,該方法對噪聲更為敏感,尤其是在距離光束腰部較遠的剖面中表現得更加明顯。
為了應對較高的靈敏度問題,對感興趣區域(ROI)進行了應用,忽略距光束中心超過 6σ 的像素,這類似於 ISO 11146-1:2021(E) 第 7.2 節中所述的方法。
對於 BeamWatch,光束剖面的寬度是在校正相機鏡頭和光圈效應後計算的。初始的 σ 值和感興趣區域(ROI)是使用 1/e² 閾值方法計算的。在隨後的每次迭代中,算法執行以下步驟:
1. 計算背景校正
2. 使用當前的 ROI 和校正後的像素強度計算新的第一矩和第二矩
3. 基於新的矩重新計算新的 σ 和 ROI
該過程會持續重複,直到 ROI 收斂或達到最大迭代次數為止
背景校正
假設背景校正在光束輪廓上是線性的(如圖1所示)。背景校正的進行方式是,在進行背景校正時,最小化噪聲對ROI邊界附近二階矩的貢獻。
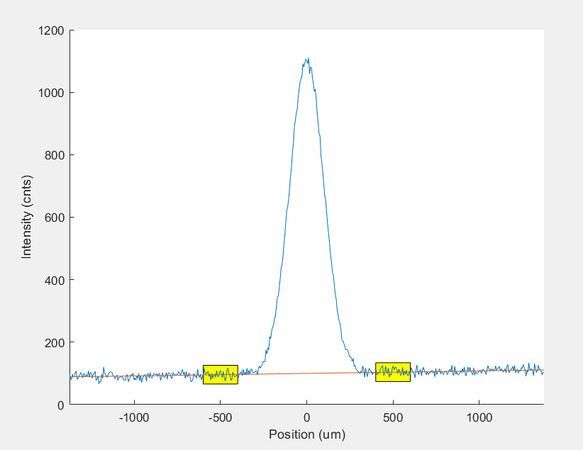
圖1 - 背景校正(為了清晰起見,已將斜率放大)
需要注意的是,如果光束過大或偏離中心,導致±6σ的ROI超出可見範圍,使用此方法可能會出現錯誤。在這種情況下,此方法可能無法找到合適的背景校正,也可能沒有足夠的數據點來計算準確的矩。
ROI評估
為了驗證ROI的正確放置,對不同光束類型進行了建模,並考慮了不同的寬度和噪聲水平。圖2顯示了這些光束的表示。此分析涵蓋了從10dB到100dB的信噪比(SNR)。
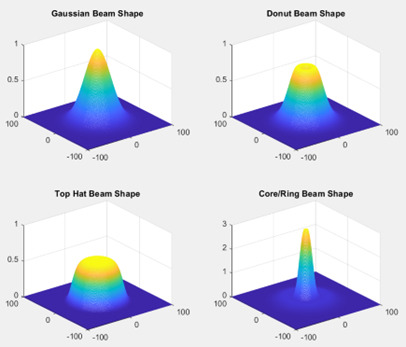
圖2 - 模擬的光束形狀
確定ROI尺寸和位置後,計算ROI中包含的光束功率百分比。該分析的結果顯示在 Table 1.
| 光束寬度(像素) | |||||
| 光束形狀 | 8 | 50 | 200 | 250 | 300 |
| 高斯 | 100.00% | 100.00% | 100.00% | 99.99% | 99.87% |
| 甜甜圈 100.00% | 100.00% | 100.00% | 100.00% | 99.93% | |
| 大禮帽 | 100.00% | 100.00% | 100.00% | 100.00% | 100.00% |
| 環/芯 99.94% | 100.00% | 100.00% | 100.00% | 99.86% | |
每個場景包含超過99%的光束功率,因此被認為是ROI的良好確定。注意,當光束寬度接近相機解析度限制(512像素)時,ROI內的功率百分比開始下降。
測量比較
為了比較D4σ(移動狹縫)方法和D4σ(迭代)方法的準確性,對多種類型的光束模型進行了模擬,並使用不同的光束輪廓和光束寬度。加入了噪聲並對輪廓進行模糊處理,以模擬BeamWatch光學系統。然後,使用BeamWatch算法處理模擬數據,並將結果與初始光束參數進行比較。
以下各節中的圖像展示了高斯光束、頂帽光束、甜甜圈光束和環形/核心光束的系統誤差和光束寬度重複性誤差。為了顯示最典型的測量場景,使用了信噪比(SNR)值為20和100的情況。
注意:這裡展示的研究是在客戶現場使用BeamWatch設備收集的真實世界數據進行的。然而,為了維護供應商/用戶機密性,本報告基於模擬數據,並顯示與真實世界數據的高度相關性。
高斯光型
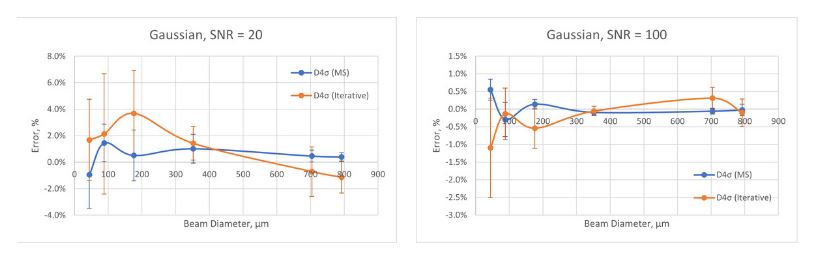
圖3 - 高斯光束光束寬度測量誤差與光束寬度的關係
頂帽光型
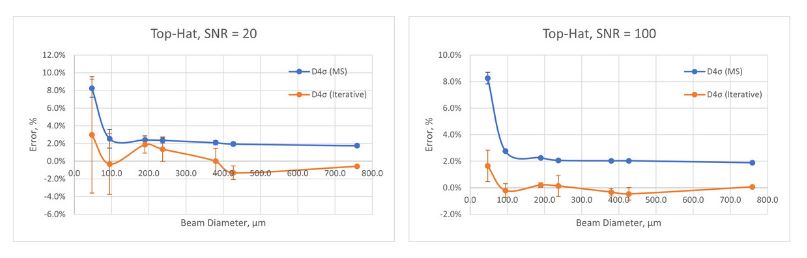
圖4 - 頂帽光束光束寬度測量誤差與光束寬度的關係
甜甜圈光型
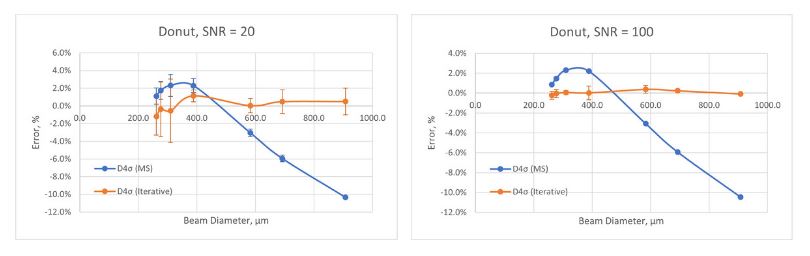
圖5 - 甜甜圈光束光束寬度測量誤差與光束寬度的關係
核心型/環形
環形/核心光束已被研究為核心內部總功率的百分比。當核心功率為0%時,光束呈甜甜圈形狀;相反,當核心功率為100%時,光束呈高斯形或頂帽形。
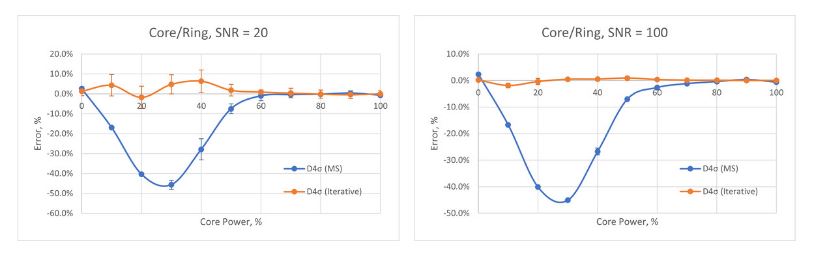
圖6 - 光束寬度測量誤差與核心功率的關係
腰部位置
光束寬度測量方法可能會導致腰部位置的變化。D4σ(迭代)方法的定義在光束焦點前後會產生對稱的焦斑,而D4σ(移動狹縫)方法則允許焦斑不對稱。
當焦斑對稱時,會產生更準確的腰部位置結果,因此在研究腰部位置和焦點位移結果時,D4σ(迭代)方法更為合適。
結論
雖然D4σ(迭代)方法在準確性和重複性方面具有許多優勢,但也存在一些缺點。隨著背景噪聲的增加,ROI放置會退化。較高的噪聲水平可能會導致無法計算焦斑擬合。大光束,特別是腰部以外的輪廓,可能會在±6σ寬度接近相機解析度限制時,精度會下降。迭代ROI過程還需要額外的處理時間,這會減慢測量速率。
給定的測量場景將決定哪種方法能產生最準確的結果。
D4σ(迭代)方法在以下情況下可能有效:
– 當光束顯著偏離典型的高斯或頂帽分佈時
– 當圖像具有高信噪比(SNR)時
– 當腰部位置和焦點位移結果很重要時
D4σ(移動狹縫)方法在以下情況下可能有效:
– 當光束接近高斯或頂帽分佈時
– 當圖像具有較高的背景噪聲時
– 當光束直徑較大時
其他可能使D4σ(移動狹縫)方法更具偏好性的因素包括之前建立的通過/失敗標準或對測量速度的關注。
D4σ(移動狹縫)和D4σ(迭代)光束寬度方法都是可行的測量技術。每種方法都符合相應的ISO標準條款,因此在BeamWatch應用程序中,當足夠的瑞利長度可見時,會顯示ISO標籤。使用BeamWatch,用户現在可以在更廣泛的光束和測量條件下獲得準確的測量結果。
文章來源: https://www.ophiropt.com/zh/a/Beam-Width-Measurement-Methods-in-Beamwatch